PATENTS

Robotic devices with ambient indications of joint status
In examples, robotic devices with ambient indications of joint status are provided. An example robotic device includes one or more actuators coupled through one or more joints to form a robotic manipulator, and an indicator co-located in proximity to the one or more joints to provide visual feedback on the robotic manipulator at the one or more joints and about the one or more joints. The visual feedback may include information indicative of an operating status of the one or more joints including an indication of an amount of torque that the one or more joints is experiencing. The robotic device also includes a controller programmable to control the indicator co-located proximal to the one or more joints to provide the visual feedback indicative of the operating status of the one or more joints.

System and method for failure detection of a robot actuator
Systems and methods for detecting actuator component or sensor failure using non-equivalent sensors are described. An example method includes actuating a robot actuator, and determining a first result and second result of the actuation using a first sensor and second sensor respectively. Additionally, the method includes determining a first estimate of an internal state of the robot actuator using the first result, and determining a second estimate of the internal state using the second result and a normalization function that normalizes the second result for comparison with the first estimate. Further, the method includes determining whether a difference between the first estimate of the internal state and the second estimate of the internal state satisfies an error threshold. And the method includes providing an output indicative of a potential fault of the robot actuator in response to determining that the difference does not satisfy the error threshold.

Fluidic robotic actuator system and method
A fluidic robotic actuator configured to assume at least a neutral position, the fluidic robotic actuator includes a first and second plate defining respective planar portions that are disposed in parallel planes in the neutral position. The fluidic robotic actuator also includes a plurality of elongated bellows extending between the first and second plates, the bellows each having a central main axis that is parallel to the central main axis of the other bellows in the neutral position, the main axis of the bellows being perpendicular to the parallel planes of the first and second plates in the neutral position, the bellows being coupled to the first and second plates at respective first and second ends of the bellows.

Semi-supervised intent recognition system and method
A computer implemented method of semi-supervised intent recognition for an exoskeleton system. In one aspect, the method includes, in response to a state transition intention input, changing the exoskeleton system from operating in a first mode with sensitivity to detecting state transitions at a first sensitivity level to operating in a second mode with sensitivity to detecting state transitions at a second sensitivity level that is more sensitive than the first sensitivity level; identifying a state transition while operating in the second mode and using the second sensitivity level; and facilitating the identified state transition by actuating the exoskeleton system.

Exoskeleton continuous-use fit evaluation system and method
A computer implemented method of semi-supervised intent recognition for an exoskeleton system. In one aspect, the method includes, in response to a state transition intention input, changing the exoskeleton system from operating in a first mode with sensitivity to detecting state transitions at a first sensitivity level to operating in a second mode with sensitivity to detecting state transitions at a second sensitivity level that is more sensitive than the first sensitivity level; identifying a state transition while operating in the second mode and using the second sensitivity level; and facilitating the identified state transition by actuating the exoskeleton system.

Cogging torque measurement for a robot actuator
Systems and methods for measuring cogging torque. An example method includes causing an electric motor to rotate in a positive direction, and for given multiple encoder positions of an encoder, determining a first respective motor winding current applied to the electric motor at the given encoder position. Additionally, the method includes causing the electric motor to rotate in a negative direction, and for the given multiple encoder positions, determining a second respective motor winding current applied to the electric motor at the given encoder position. Further, the method includes, for the given multiple encoder positions, determining a respective cogging torque based on a difference between the first and second respective winding currents. And the method includes storing a cogging torque profile for the electric motor in a database based on the determined respective cogging torque for the given multiple encoder positions.

Methods and apparatuses for selectively controlling motor power boards
Methods and systems for building arbitrary motor controllers are described. An example motor controller may include multiple motor power boards connected in a stacked configuration and coupled in parallel. Each motor power board may include one or more power transistors and one or more gate drivers having an input terminal coupled to a control signal connector and an output terminal coupled to a gate terminal of the one or more power transistors. The example motor controller may also include a power bus connector coupled, in parallel, to a respective output terminal of each of the multiple motor power boards. Further, the example motor controller may include a control system coupled to the control signal connector and configured to selectively enable a set that includes one or more of the multiple motor power boards based on an output power requirement.

Powered device to benefit a wearer during skiing
An exoskeleton system having an actuator unit configured to be coupled to a leg of a user. The actuator unit includes an upper arm and a lower arm that are rotatably coupled via a joint, the joint positioned at a knee of the user with the upper arm coupled about an upper leg portion of the user above the knee and with the lower arm coupled about a lower leg portion of the user below the knee; a fluidic actuator that extends between the upper arm and lower arm; and one or more fluid lines coupled to the fluidic actuator to introduce fluid to the fluidic actuator that causes force to be applied to the upper arm and lower arm.

Exoskeleton data labeling system and method
The disclosure includes an exoskeleton network. The exoskeleton network includes an exoskeleton system that has one or more sensors and a memory; a user device that is local to the exoskeleton system and that operably communicates with the exoskeleton system; and a classification server that operably communicates with at least one of the exoskeleton system and the user device. The exoskeleton network performs feature extraction on sensor data obtained from the one or more sensors to generate feature-extracted sensor data and performs label derivation on the feature-extracted sensor data to generate labeled sensor data.
Active

Exoskeleton fit evaluation system and method
A method of performing a fit test on an actuator unit coupled to a user. The method includes determining a first configuration of the actuator unit while the actuator unit is in an un-actuating state and while the user is in a fit test position; actuating the actuator unit; determining a second configuration of the actuator unit generated in response to the actuating the leg actuator unit; determining a change in configuration of the actuator unit based at least in part on the difference between the first and second configuration; and determining that the change in configuration corresponds to an improper fit of the actuator unit to the user.

System and method for user intent recognition
A method of operating an exoskeleton system that includes determining a first state estimate for a current classification program being implemented by the exoskeleton system; determining a second state estimate for a reference classification program; determining that a difference between the first and second state estimate is greater than a classification program replacement threshold; generating an updated classification program; and replacing the current classification program with the updated classification program based at least in part on the determining that the difference between the first and second state estimates is greater than the classification program replacement threshold.
Pending

Battery systems and methods for a mobile robot
An exoskeleton system comprising: a power system that powers the exoskeleton system, the power system including one or more battery slots, and a modular battery set that includes one or more battery units that are modular such that any of the one or more battery units can be readily and quickly removed and coupled within any of the one or more battery slots to provide power to the exoskeleton system.

Control system and method for a mobile robot
A method of operating an exoskeleton system comprising: obtaining a set of sensor data from at least sensors associated with one or more actuator units; determining a maneuver state based at least in part on the set of sensor data; determining a configuration of the one or more actuator units based at least in part on the set of sensor data; generating one or more reference targets for the one or more actuator units based at least in part on the determined maneuver state; determining that the one or more actuator units is outside of a generated reference target one or more actuator units; and causing the one or more actuator units to be configured to be within the generated reference target for the one or more actuator units.

Data logging and third-party administration of a mobile robot
A method of configuring one or more exoskeleton systems in an exoskeleton network, the method comprising: receiving exoskeleton data from one or more exoskeleton systems that are operably connected to a network; storing the exoskeleton data from the one or more exoskeleton systems; generating a configuration input for configuring at least one of the one or more exoskeleton systems; and sending the generated configuration input to the at least one of the one or more exoskeleton systems via the network to cause the at least one of the one or more exoskeleton systems to be configured based at least in part on the generated configuration input.

Direct drive pneumatic transmission for a mobile robot
An exoskeleton system comprising a fluidic actuator and a power transmission that includes: a transmission body that defines a transmission chamber configured to hold a fluid, the transmission body having a first and second end, and a piston that translates within the transmission chamber between the first and second ends of the transmission body, with translation of the piston within the transmission chamber changing a volume of the transmission chamber. The exoskeleton system also includes a mechanical power source coupled to the power transmission configured to cause the piston to translate within respective transmission body to change the volume of the transmission cavity; and a first fluid line that couples the power transmission to the fluidic actuator.

Fit and suspension systems and methods for a mobile robot
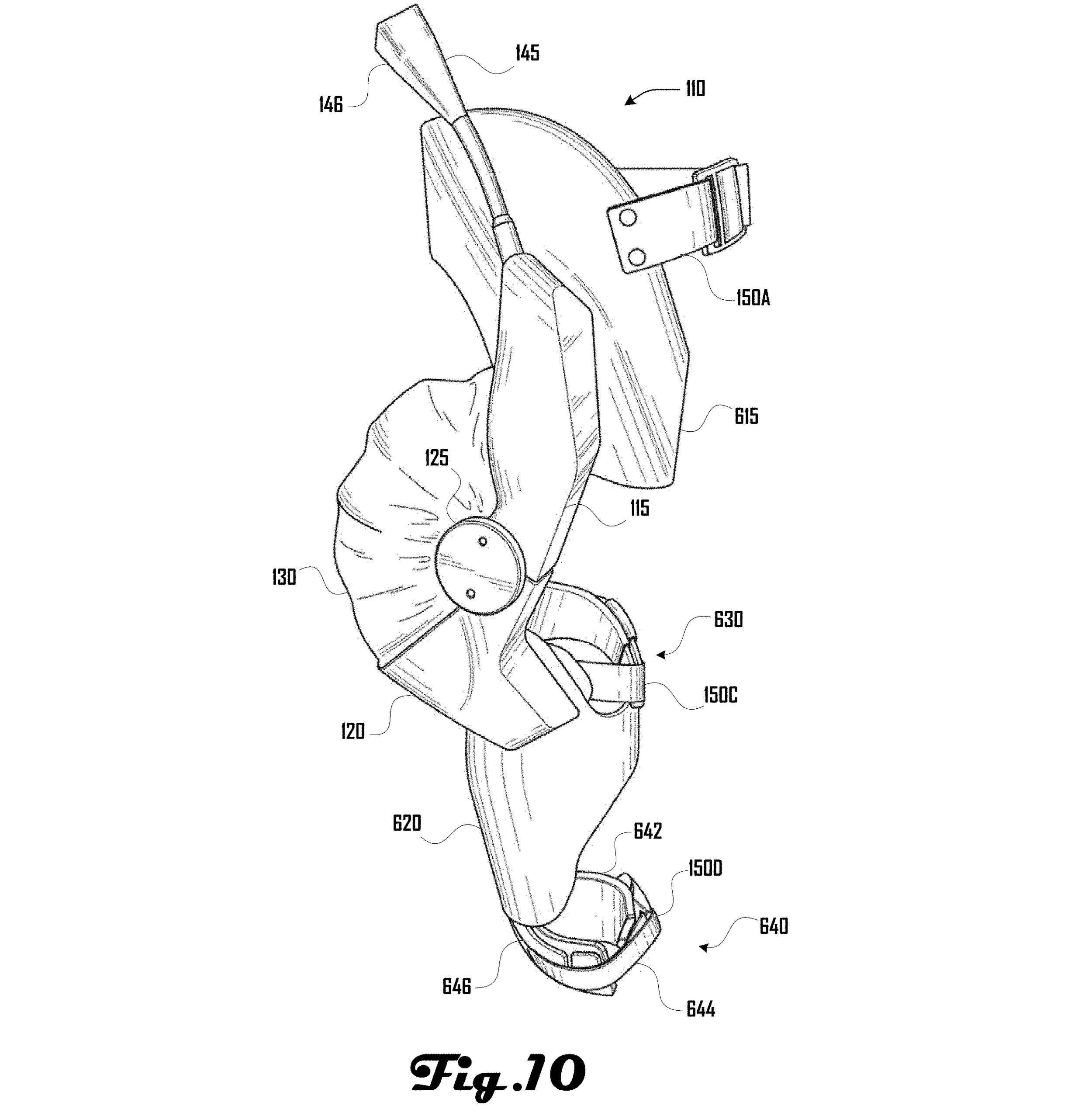
An exoskeleton system comprising a leg actuator unit that is configured to be coupled to a leg of a user. The leg actuator unit includes: an upper arm and a lower arm that are rotatably coupled via a rotatable joint, the rotatable joint configured to be positioned at a knee of the user with the upper arm coupled about an upper-leg portion of the user above the knee and with the lower arm coupled about a lower-leg portion of the user below the knee. The upper arm is configured to be coupled to the upper-leg portion above the knee via a first set of couplers that includes a first upper-leg coupler, the lower arm is configured to be coupled to the lower-leg portion below the knee via a second set of couplers that includes one or more lower-leg couplers associated with a lower-leg brace, and an actuator extends between the upper arm and lower arm, the actuator configurable to move the upper arm and lower arm.
Modular exoskeleton systems and methods
A method of operating a modular exoskeleton system, the method comprising: monitoring for one or more actuator units being operably coupled to or removed from the modular exoskeleton system, the modular exoskeleton system comprising at least a first actuator unit configured to be operably coupled and removed from the modular exoskeleton system; determining that the first actuator unit has been operably coupled to the modular exoskeleton system; determining the first actuator unit has been associated with a first body portion of the user; determining a first new operating configuration based at least in part on the determination that the first actuator unit has been operably coupled to the modular exoskeleton system and the determination that the first actuator unit has been associated with the first body portion of the user; and setting the first new operating configuration for the modular exoskeleton system.

Powered medical device and methods for improved user mobility and treatment
A method of configuring a treatment regimen of one or more exoskeleton systems in an exoskeleton network, the method comprising: receiving exoskeleton data from one or more exoskeleton systems that are operably connected to a network; storing the exoskeleton data from the one or more exoskeleton systems; generating a configuration input for configuring at least one of the one or more exoskeleton systems the configuration input including a replacement for or update to a current medical treatment regimen being implemented by the at least one of the one or more exoskeleton systems; and sending the generated configuration input to the at least one of the one or more exoskeleton systems via the network to cause replacing or updating the current medical treatment regimen being implemented by the at least one of the one or more exoskeleton systems.
Skiing exoskeleton control method and system
A method of operating an exoskeleton system that includes obtaining a first set of sensor data from one or more sensors associated with one or more leg actuator units of an exoskeleton system during a user activity, the first set of sensor data indicating a first configuration state of the one or more actuator units; determining, based at least in part on the first set of obtained sensor data, to change configuration of the one or more leg actuator units to a second configuration state to support a user during the user activity; and introducing fluid to one or more fluidic actuators of the one or more leg actuator units to generate the second configuration state by causing the one or more fluidic actuators to apply force at the one or more actuator units.

User interface and feedback systems and methods for a mobile robot
An exoskeleton system comprising at least one leg actuator unit configured to be coupled to leg of a user, the leg actuator unit including: an upper arm and a lower arm that are rotatably coupled via a joint, the joint positioned at a knee of the user with the upper arm coupled about an upper leg portion of the user above the knee and with the lower arm coupled about a lower leg portion of the user below the knee, a leg-actuator-unit user interface comprising a plurality of input and feedback elements, and an actuator that extends between the upper arm and lower arms.