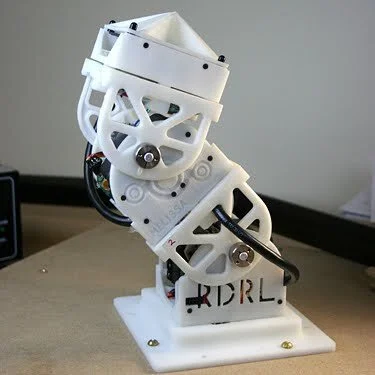
Two nodes and a “tool”.
RDRL
c. 2008
The aim of the project was to design a system of simple robots that would act asynchronously and collaborate to work as a limb and manipulate a target. The project was an adaptation of the classic problem collaboration between multiple simple robotic systems to accomplish a complex task. In this case the robots are physically connected and must work directly with each other to complete the goal of manipulating the target. Each robotic "node" has no awareness of the other nodes; however, all nodes can communicate with the master node to provide node specific data. The master node is aware of the overall goal and has sensor input to gauge the success of the entire system. This provides an interesting model that could have the potential to be used in several different situations with little or no input from any human operator. Typical collaborative systems consist of separate vehicles that act together to either map an environment or solve a task such as moving an object. This project would utilize similar principles to create a fairly complex robot by using a few simpler robots. By using these smaller, less complex parts it should be possible to create a system that is highly reconfigurable. This ability would allow a platform like this to be integrated quickly with research platforms as a tool manipulator or in a manufacturing system to handle hazardous materials or complete tedious tasks.
Watch it in action!

The joints could be clocked 90° and were held together with magnets in each corner. The posts stabilized the connection. All of the 3D printed plastic parts are coated in super glue.

The power regulator board. It sits on top of the processor board, connected through headers.

That’s a 200 MHz arm 9 with a few hundred MB of NAND flash, 256 kB of SRAM (SDRAM?) and a full sized SD slot on the back. I hand soldered each board using solder paste and a toaster oven.

The servos and shell. It needed two and a step down to get enough oomph to to move its brethren around. Note: those weren’t the final gears or shaft. The shaft went from delrin to hardened aluminum and metal gears.